

技术详细介绍
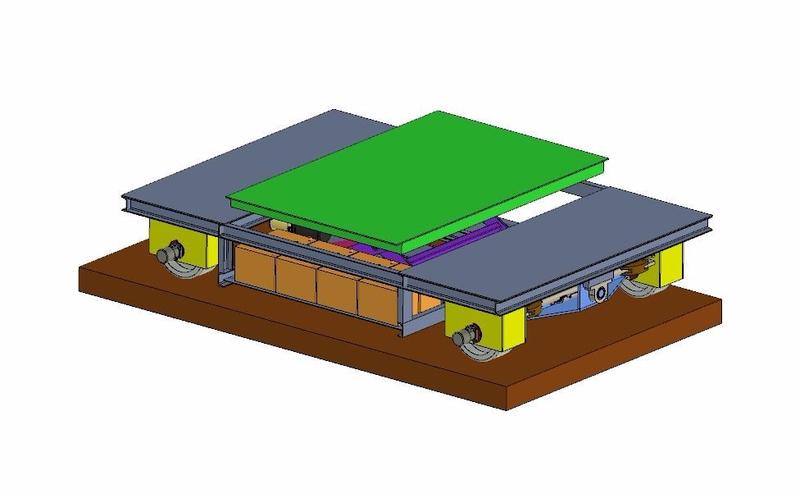
该全方位移动拖车的电控系统设计为:通过遥控器给PLC信号,PLC控制五台液压站给系统提供动力,再通过控制液压马达和液压阀来控制四个车轮的速度和转向角度。由编码器采集回来的速度和角度反馈给PLC实现闭环控制。
使移动拖车实现以下三种运动模式:
1、全方位直线移动。
2、前后、左右四个方向的直行及差速转弯。
3、原地自转。 本项目所研究的遥控式全方位移动拖车的主要特点和优势在于低成本、高负载、运行时间长、控制电路设计可靠性高。
本项目所研究的遥控式全方位移动拖车的技术指标:
1、运载工件吨位最大20T
2、行走速度0-8m/min
3、可实现前进、后退、360°转向、原地旋转、升降高度200mm。
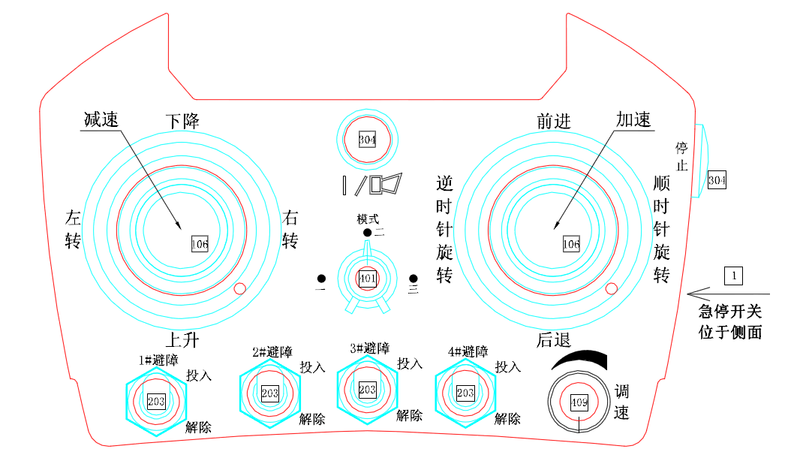
4、控制方式:遥控控制
5、防碰撞安全有效距离:2.5米时报警,1米时停止设备。
6、运行时间8小时